

IMMY Inc.首席执行官/首席技术官 Doug Magyari讨论了基于反射镜的光学器件的使用,并挑战了在近眼应用中使用基于镜头的光学系统的现有光学范例,这种范例会产生平面图像并导致“聚散” /住宿冲突’。IMMY 提供了一种替代方法,利用基于镜子的光学器件来生成体积图像,这不会导致这种冲突。
作者:道格·马吉亚里
人们通常认为人类以 3D 方式看待世界。更准确地说,我们是通过体积来看待世界的。当光线从多个角度射向我们时,眼睛会收集光数据,大脑的视觉皮层会根据数据呈现图像。实际感知的视觉体积是每条光线在不同时间从多个角度到达眼睛的结果。正是时间差创造了我们所看到的体积;这一基本点怎么强调都不为过。时间是大脑视觉皮层用来确定深度的主要影响因素。立体或视差是深度知觉的一个组成部分。如果立体视觉是导致我们对世界的体积感知的主要因素,那么如果我们遮住一只眼睛,一切都会塌陷成一个平面。我们的大脑不仅使用视差来创建 3D 视图,而且还使用时间来生成体积。
如今,几乎所有近眼 (NTE) 系统都使用某种形式的镜头来创建图像。它们的设计目的是为了像相机镜头通过设置图像平面来观察世界一样;而不是像我们人眼看到的世界那样以体积为单位。镜头使光线成像到平面上,这与体积相反。在现实世界中,不存在像平面这样的东西。这是一个人为的设计,是当前 AR/VR/MR/XR 硬件光学策略的最大限制因素。固定距离、平面成像会导致聚散/调节冲突 (VAC)、眼睛疲劳和眼睛疲劳。基于镜头的传输可以被认为是将源体积图像(如观察现实世界的相机)压缩为由眼睛和大脑检测到的投影平面虚拟图像。
平面波前是问题所在,自由形状波前是解决方案
如果基于镜头的 NTE 系统尝试创建 3D 图像,它将使用两个稍微偏移的平面图像来创建立体效果。基于镜头的 NTE 系统使用相机平截头体来尝试设置感知距离,但这与现实世界没有相关性,因为生成的图像是平面的。这种强制 3D 视觉效果导致许多人无法长时间观看 3D 内容而不会造成眼睛疲劳或恶心。眼睛和视觉皮层对进入眼睛的平面波前感到不舒服,因为这在现实世界中不会发生。我们的愿景基于自由波前。
正确设计头戴式显示器,满足无眼疲劳、恶心或眼疲劳的基本标准;光学设计必须遵循人类如何看待现实世界的规则,它必须创建自由形式的波前体积图像。
有一种方法可以生成体积图像并将其传递给眼睛 – 使用镜子
首先,重要的是要了解镜子没有图像平面。镜子只会把你喂给它的东西返还给你。您可以舒适地看到从 <1 毫米到无限远的范围。镜子可以提供无限的景深并且不限于图像平面。
由于镜子没有像平面,因此它们不会引起聚散/调节冲突——它们是调节不变的;当您观看镜子中可见的所有物体时,它们始终处于焦点之中。举个例子; 当你看汽车后视镜时,后座上的孩子们就是焦点。如果您决定看向身后 300 英尺或半英里的地方,那也是焦点所在,只是因为您决定将注意力集中在其他事情上。发生这种情况是因为眼睛从各个深度连续接收自由形状波前。
世界是一面镜子
当我们看现实世界时,人类不存在辐辏/调节问题。光从我们视野中的每个物体反射,我们的眼睛收集反射的光能,视觉皮层根据数据生成图像(如果有足够的单声道和立体线索来这样做)。你可以说整个世界是一面镜子,它把光线反射到我们的眼睛里,大脑的视觉皮层根据光线形成图像。
由于当你看镜子时,镜子中的所有东西都是清晰的,所以人们可以选择接近的东西;这会自然地改变眼睛的调节,自动调整(但不会模糊)视觉皮层中的非必要视觉信息,而不是人为地模糊源图像,从而导致视觉和大脑不适。
尝试强行趋同是不必要的,也是不可取的;这不是人类视觉系统的工作原理。强迫眼睛适应模糊和 PSF(点扩散函数)对比度会导致眼睛疲劳,并且不能解决现实世界的视差问题。换句话说,这不是真正的解决方案。唯一不会造成困扰的方法是IMMY独特的镜像方法。
自然眼光学系统
IMMY 体积镜光学系统可产生真正的光场特性,因此会自然地发生聚散和调节,因此得名“自然眼光学系统”。只有创建体积图像才能自然地实现真正的沉浸感以及内容与现实世界的真正关联。
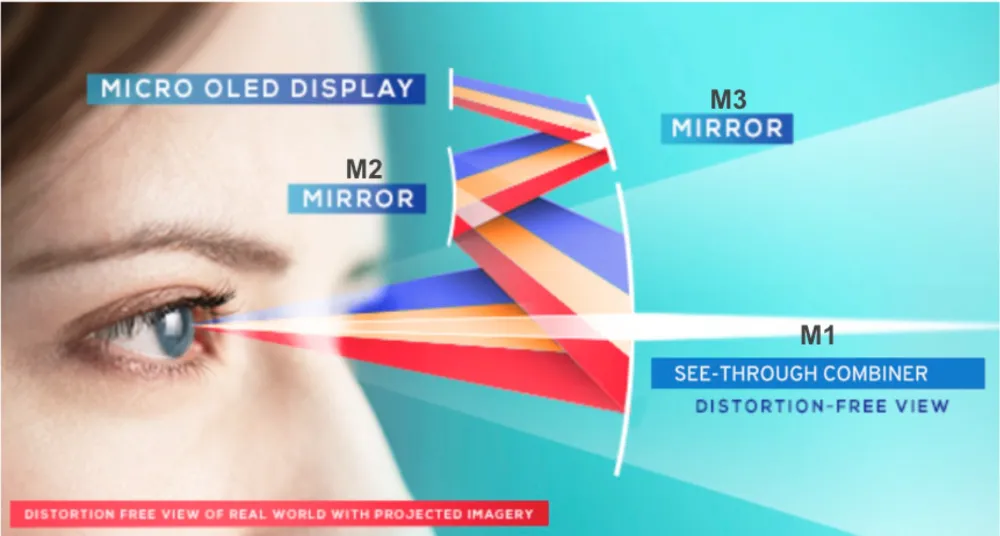
利用镜子的变焦属性来应用近眼显示器,需要一个至少具有三次反射的多级中继系统,以实现令人满意的耐磨性、宽视场、可接受的外形尺寸、大视窗、低失真和广泛的 IPD 适应能力。满足此类系统要求需要使用高度复杂的自由形状离轴凹凸镜面。我们的系统产生将体积虚拟图像放置在任何深度的效果,从而展现真实的光场特性。

它是如何运作的
首先,我们将原始 2D OLED 显示光线转换为自由形状波前。使用双凹自由曲面镜将光能的原始朗伯(半球辐射)分布转换为体积显示(参见上面的 M1)。半球形波前以时间差进入双凹M1镜,在不同时间到达曲面上的不同位置。这会导致原始 2D 平面显示器的超级采样(升级)被 M2 镜子“视为”一个体积。这提供了真实的体积自由形状波前,并被传递到放大镜 M2 [参见上面的 M2]。每个像素的每个点在 M1 曲面镜上的每个点都可见;这使得整个图像体积能够同时传输到 M2,即使它现在具有复杂的拍号。这是一种离轴反转,其中来自 M1 的光线在 M2 上彼此重叠,面积缩小约 30:1。这种极其复杂的自由曲面波前通过 M2 复合凸自由曲面 [参见上面的 M3] 传递到 M3(组合器)镜面,从而创建真正的光场体积图像。M3 是光线束被分解、准直并直接通过瞳孔传递到视网膜的地方。
我们的自由曲面从 M1、M2 和 M3 自由曲面反射的自由曲面可将虚拟图像放置在任何深度和多个视角,从而使眼睛能够自由移动,从多个不同角度吸收自由曲面光能。这种吸收和处理单声道和立体声线索的自然过程会产生具有非常大的眼箱的适当深度的对焦图像。
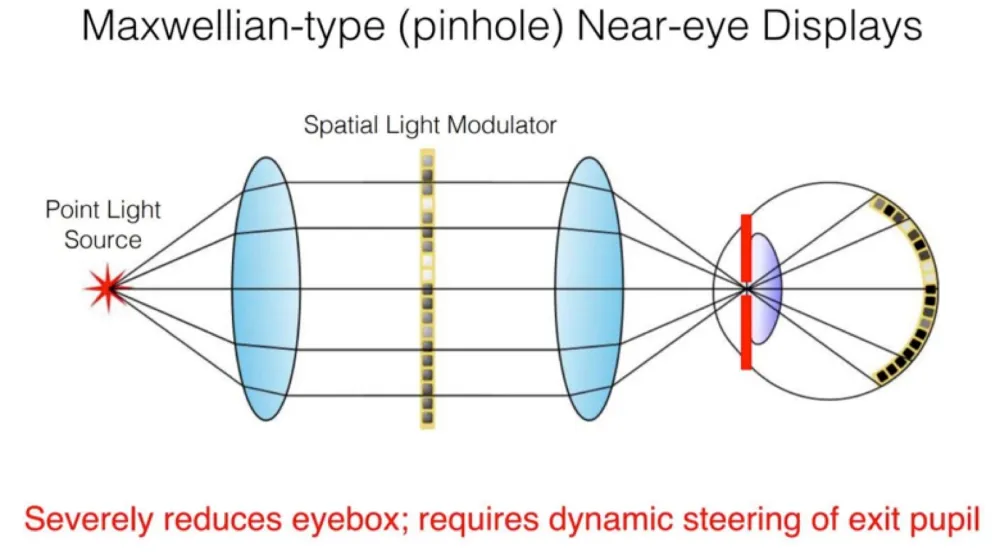
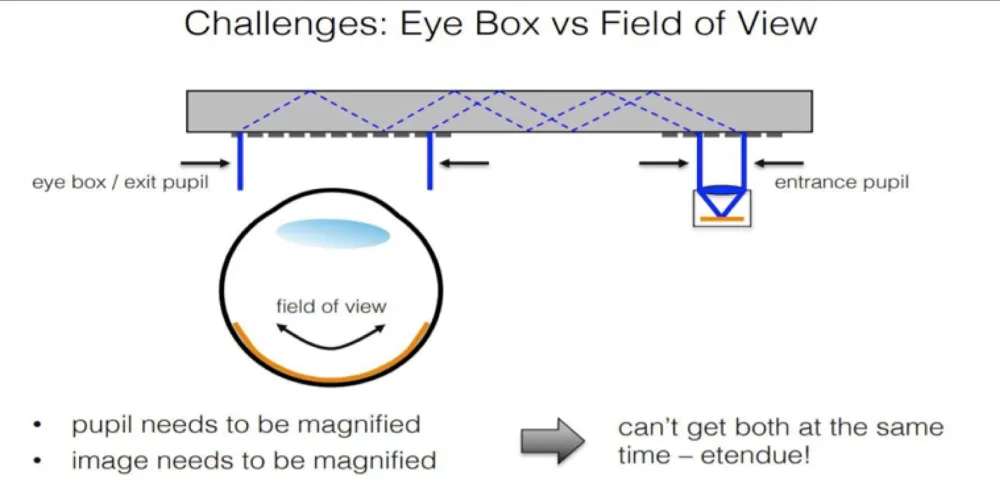
与麦克斯韦针孔型光学器件不同,麦克斯韦针孔型光学器件具有非常小的眼盒和大景深 (DoF),IMMY 光学器件可生成极大的 DoF,并具有大眼盒。这种镜面光学方法满足了人体舒适度、人体安全、眼睛舒适度和眼睛安全的基本需求。下面是 SIGGRAPH 演示文稿(下文引用)的幻灯片,显示了麦克斯韦问题和小眼盒的波导问题。
与麦克斯韦针孔型光学器件不同,麦克斯韦针孔型光学器件具有非常小的眼盒和大景深 (DoF),IMMY 光学器件可生成极大的 DoF,并具有大眼盒。这种镜面光学方法满足了人体舒适度、人体安全、眼睛舒适度和眼睛安全的基本需求。下面是 SIGGRAPH 演示文稿(下文引用)的幻灯片,显示了麦克斯韦问题和小眼盒的波导问题。
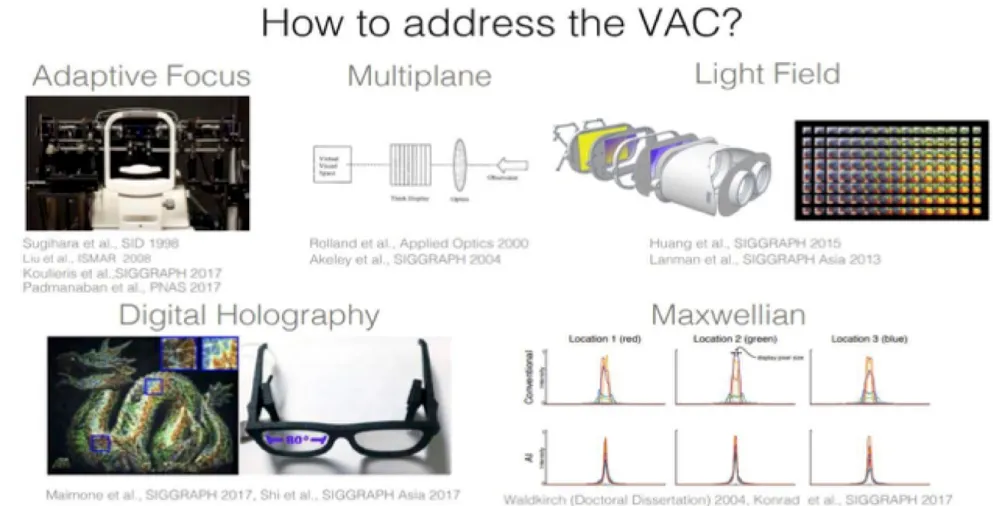
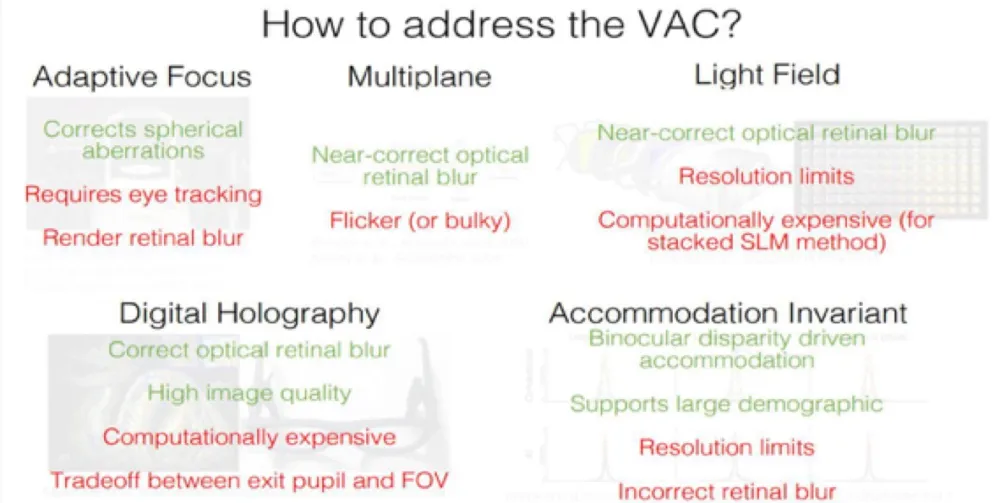
目前,IMMY 的方法是独特的、无镜头的。除了 IMMY 之外,所有头显都使用某种镜头组合来创建虚拟图像。由于镜头在固定距离处产生像平面,因此VAC 是一个光学引起的问题。因此,任何使用镜头的耳机都会受到 VAC 的影响,并且需要实施某种形式的校正。这些校正方法计算量大、成本高,并且在大多数情况下会引起额外的眼睛疲劳和人为因素问题。人类视觉系统过于复杂,无法人工解决这个问题。以下是同一 SIGGRAPH 演示中发布的尝试解决 VAC 问题的几个示例。而且,也许更重要的是,这些尝试的解决方案只是改变生成的平面波前的焦距,这并不是实际问题的解决方案。真正的问题是如何让自由形状的光而不是平面波前进入眼睛。
经过数十年的尝试,生产经济实用的 AR/VR/MR/XR 耳机,所有这些都是同一主题的变体,但这种方法显然存在问题。花费了数十亿美元进行越来越复杂的尝试,但没有取得令人满意的结果。尽管这个镜像系统的内容远远超出我在几页纸中所能展示的内容,但它展示了头戴式显示器的构建方式的重大范式转变。人类视觉系统的操作方法是中心主题,目标是尽可能呈现自然且纯粹的自由形式波前图像。视觉皮层负责剩下的工作。
——完——
参考:auganix
